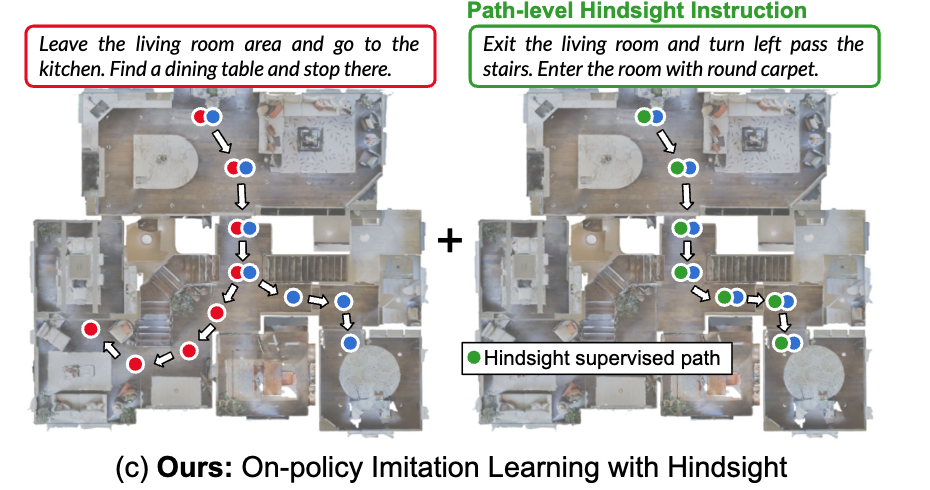
[Under Review] Hindsight semantic exploration for vision-language navigation
Generative hindsight reasoning provides semantic supervisions for on-policy explorations
I am a PhD candidate in Artificial Intelligence at Korea University, advised by Prof. Sangpil Kim. I am also fortunate to be advised by Prof. Honglak Lee during my visiting research at the University of Michigan. I enjoy studying how embodied agents interpret human language, perceive their environments, and take actions. Specifically, my primary research focuses on developing data-efficient training methods for language-guided embodied decision-making, with the goal of reducing reliance on human-annotated data.
Generative hindsight reasoning provides semantic supervisions for on-policy explorations
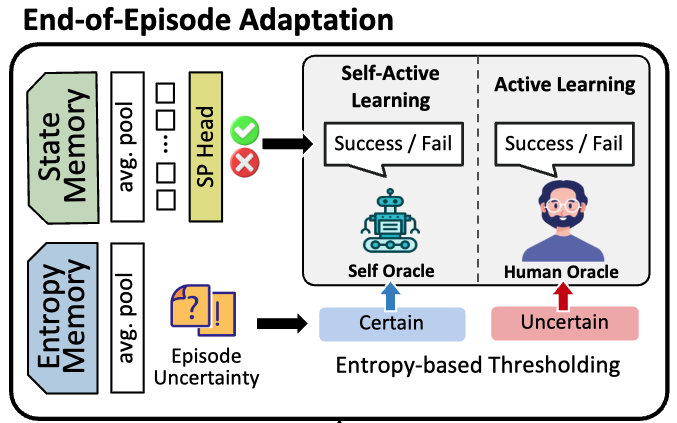
Uncertainty-based self-active test-time feedback system for navigation agents
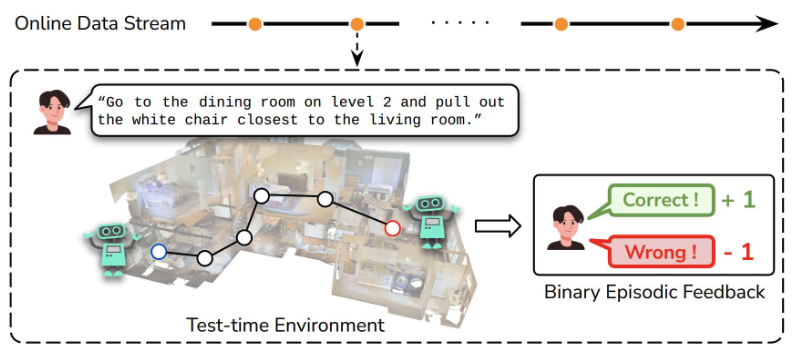
Binary feedback-based RL enables test-time adpatation for navigation agents.
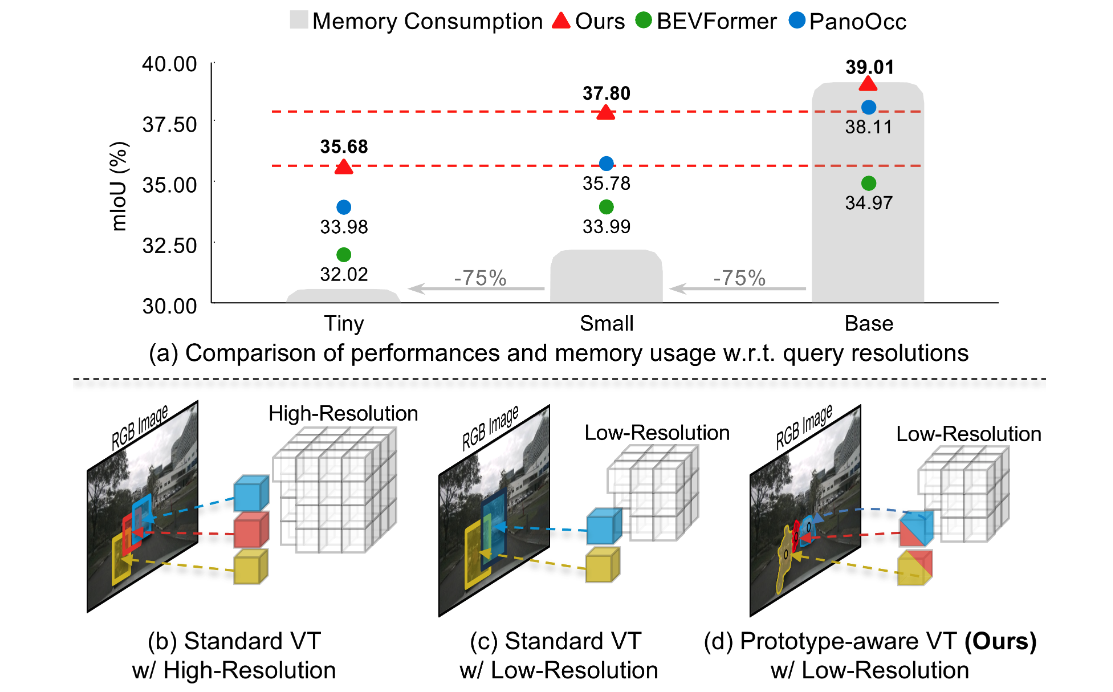
Mapping of 2D cluster features onto 3D voxel complements the loss of spatial storage for low-resolution queries.
The rippling indirect social relations that were always there to affect your trajectory